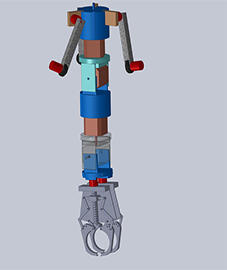
BORE WELL CHILD RESCUE ROBOT
COMPONENTS REQUIRED:
- Stepup transformer =1
- Normal camera = 4
- Night vision camera =1
- Microphone =1
- Speaker =1
- 5.5 kg torque stepper motor =4
- Ordinary stepper motor =6
- Gripper motor =2
- Signal transmission wire
- Power transmission wire
- Wire for Camera output
- Wire for microphone output
- LED lights
- Microcontroller (arduino processor)
- Joystick =2
- Laptop =1
- Monitor LED monitor =1
- Motor shaft bearings
- Steel rope
- Oxygen cylinder + hose
- Oxygen sensor
- Lubricant (water) + hose
- Rubberomni wheel =3
- Leather cylindrical mat with one way stripper 1
- Bag lock clip =2 pair
Step up transformer
This is to amplify the power to the robot deep inside the borewell. So as between every 200m their should be placed a step up transformer.
Normal camera
4 cameras were placed at specific positions to find the movements of the robot inside the borewell.
3 cameras were placed on the top, on the back of the motor driving the guide arms.
1 is placed on the side which is analyzed where the vision is not clear.
Night vision camera
1 night vision camera is placed on the wrist before the gripper to find the gripper that whether it is locking the child's hand in.
Microphone
To hear the baby's talk , and with respect to this many useful decisions and needs were fulfilled.
Speaker
To give guidance to the child.
5.5 kg torque stepper motor
These motors were used to position the gripper inside the tube. Also helps in various movements of the gripper.
Ordinary stepper motor
These were used to operate the guide arms. Three were used to open the guide arms, and other three were used to roll the entire robot about pipe axis.
Gripper motor
This is used for the opening and closing of the gripper fingers. It helps in total functionality of the system.
Signal transmission wire
Transmits video audio towards the control computer and also takes the controls of various stepper actions towards the controller inside the robot.
Power transmission wire
This wire transmit electric power to the robot. Transmitting power is more safer than preparing a source for battery.
Wire for camera output
The output from the camera is sent to the computer above the ground to view the operation of the robot and the child movement.
Wire for microphone output
To take the output from the microphone to the speakers connected with the computer.
LED lights
These lights works in less power and make the vision clear for the cameras connected with the robot. Also it gives a rescuing hope for the child.
Microcontroller(arduino processor)
This controller controls all motors and movements for the robot to which the operator operates from the top.
Joy stick=2
Through which the controls for the motors were given to the controller for conversion.
Laptop=1
For controlling the over all actions performed by the robot. Also to decode the video and audio sent from the robot
MonitorLEDmonitor=1
To view the various camera outputs.
Motor shaft bearings
This setup reduces the friction between the motor shaft and the driven shaft.
Steel rope
This helps in holding the robot from top towards the stand. In this rope the entire weight of the robot and he child will be beared.
Oxygen cylinder+hose
The oxygen content inside the bore well will be very low. So the child will find difficult to breathe. So it is very necessary to sent oxygen.
Oxygen sensor
This finds how much of oxygen is there inside and allows the oxygen according.
Lubricant(water)+hose
This is sprayed to the child after the child is strongly held to the stripper. It is sprayed to avoid much friction between child and the side walls.
Rubber omni wheel=3
This wheels have the ability to move in 4 directions. So it is easier to move the robot.
Leather cylindrical mat with one way stripper 1
This allows the robot gripper to lock the childs hands with the steel rope.
Bag lock clip=2 pair
This is attached with the stripper to lock the leather cylindrical mat to hold the hands tightly.

